Change the way industrial robots work for you
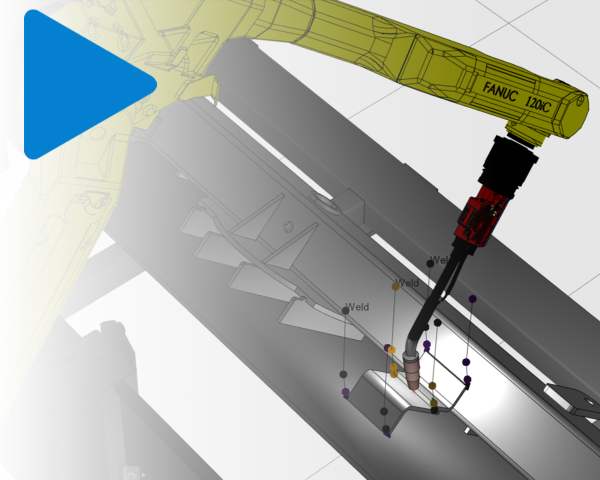
OCTOPUZ Offline Robot Programming (OLRP) software enables complex robot applications to be programmed in a virtual, offline environment, without disruption to your manufacturing process and without the need for an onsite robot programming expert. OCTOPUZ eliminates the need for your robots to be taken out of production, greatly improving your productivity and bottom line.

Learn quickly and reduce complexity with a simplified user experience

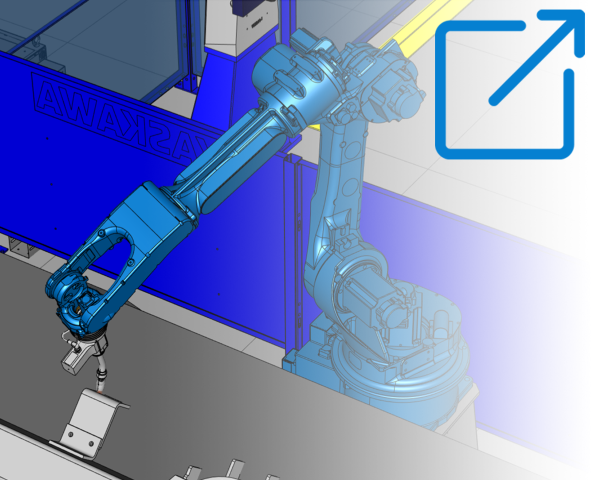
Access from anywhere with flexible user-based accounts

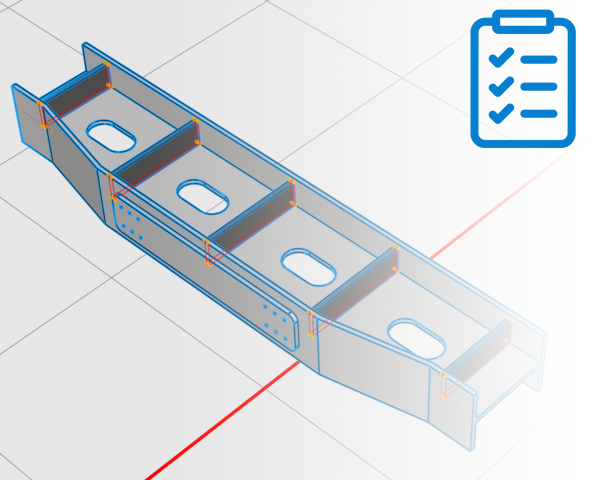
Easily jump into new projects with calibrated cell templates

Program mechanisms in the virtual world exactly as they are in the real world
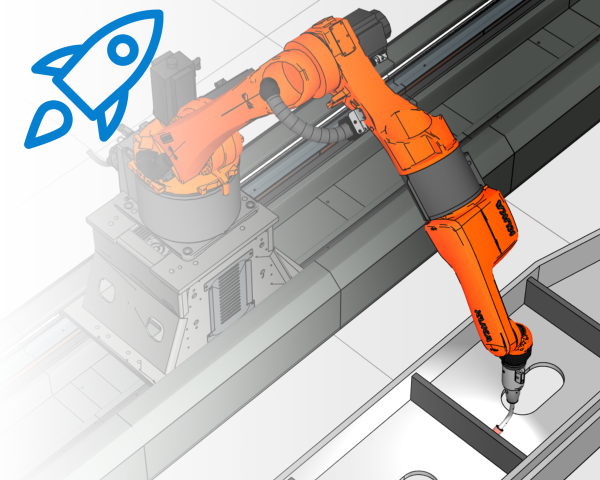
Automatically detect and avoid robot errors

Optimize robot programs to reduce cycle time