Product Update
Feature Spotlight
Videos
Please choose from one of the following categories
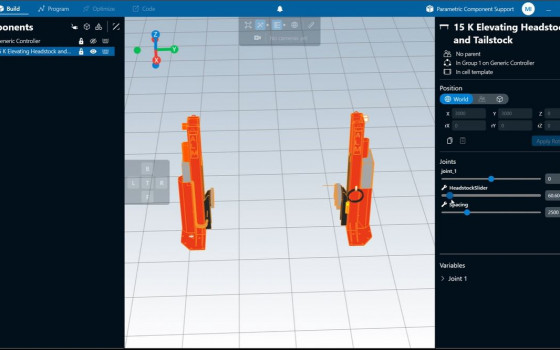
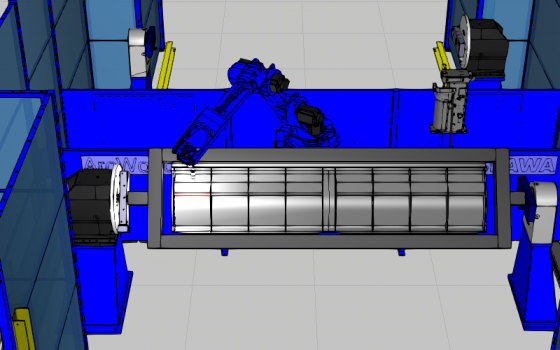
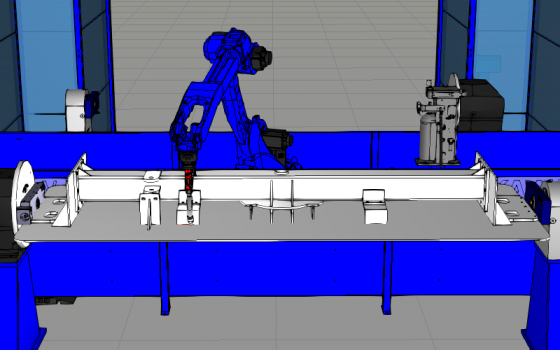
Mechanisms with a parametric joint, such as an adjustable linear height position on a rotary axis, are now supported.
Learn about the latest improvements to OCTOPUZ in our March 2024 release.
Learn about the latest improvements to OCTOPUZ in our January 2024 release.
Learn about the latest improvements to OCTOPUZ in our July 2023 release.
Learn about the latest improvements to OCTOPUZ in our March 2023 release.
Import your robot backup containing individual joint and linear motions as a program.
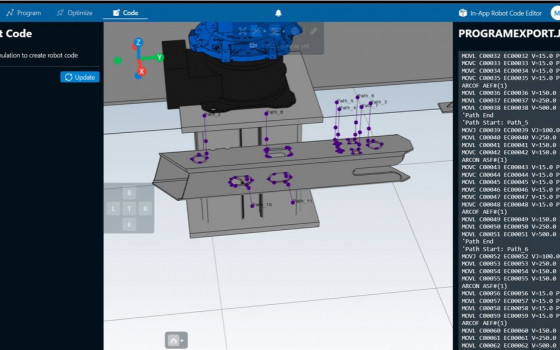
Our in-app robot code editor is better than ever, with a wider view more for easier review prior to taking your robot code to production.
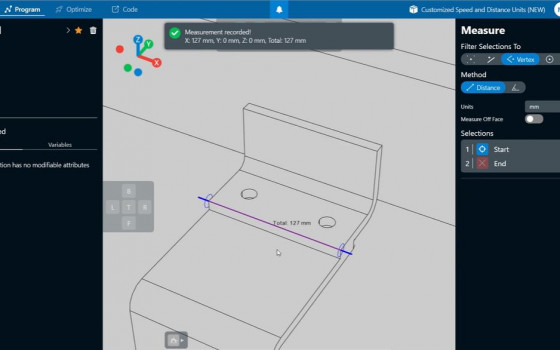
Depending on your project or robot brand, you may be working with different units of measurement. Choose any speed or distance units to use throughout OCTOPUZ.
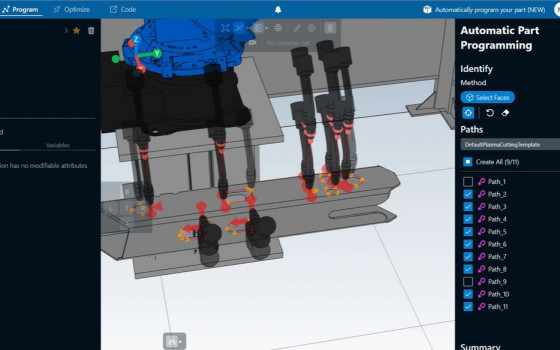
Using our automated part detection, you can now create multiple cutting paths in just a few clicks.
Learn about the latest improvements to OCTOPUZ in our November 2022 release.
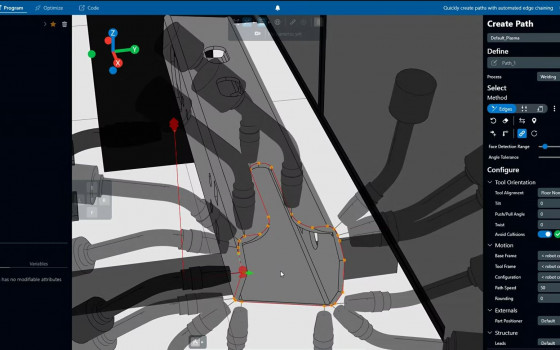
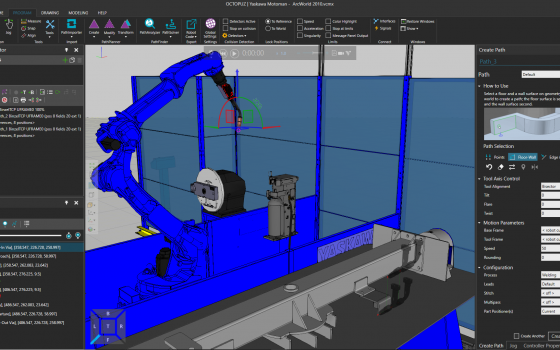
Build paths following multiple edges with significantly improved edge selection and brand new tools to chain your path together automatically.
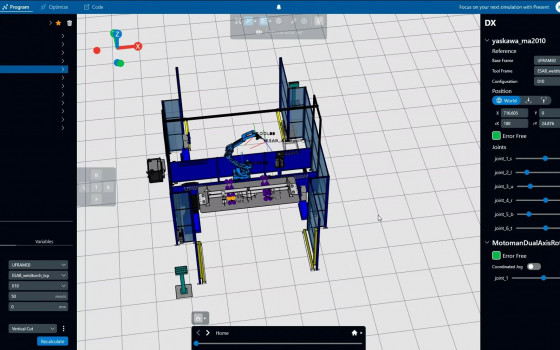
Our new “Present” mode provides a focused, full-screen view of the 3D world for simulation playback.
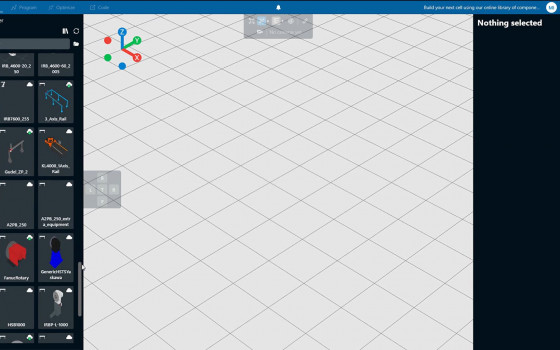
A new online library of components containing robots and positioners from a variety of brands is ready and available for your next robot cell build.
Import complex toolpaths created in an external CAM software directly into OCTOPUZ, and then modify, verify, and simulate your paths and create production-ready robot code.
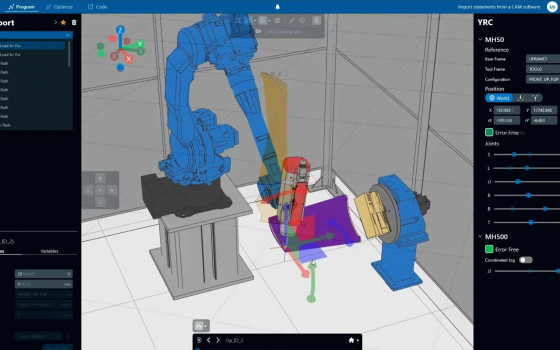
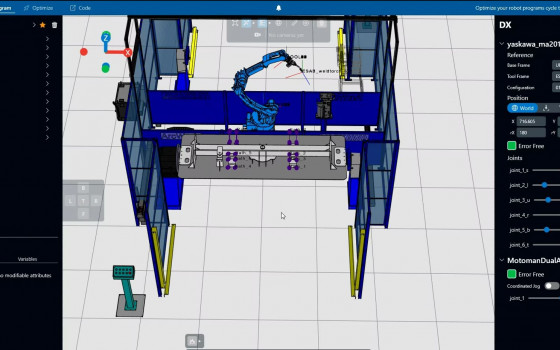
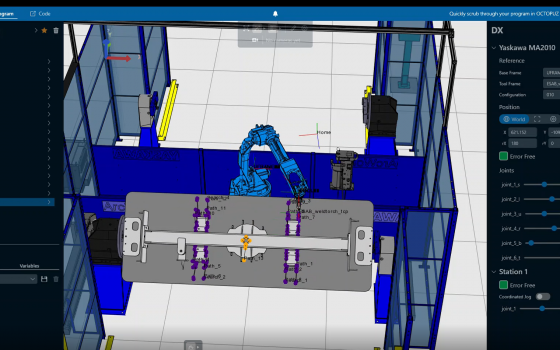
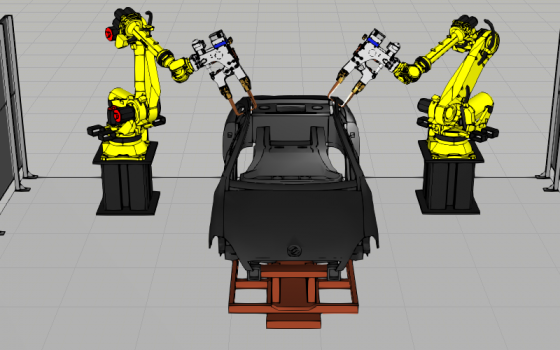
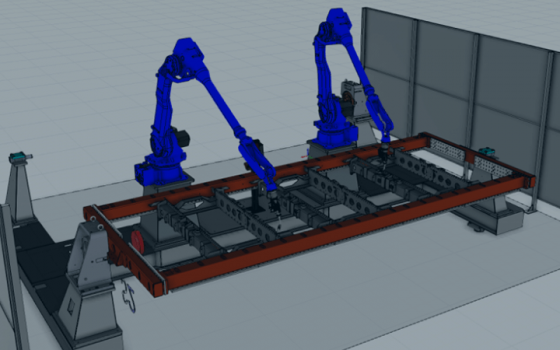
Easily program your complex multi-robot system environments exactly as you would on a pendant, where a single controller can control multiple robots and external positioners.
View your robot programs’ statistics and operating efficiency, and instantly optimize them to reduce total cycle time via automatic sequencing of statement order.
Learn about the latest improvements to OCTOPUZ in our July 2022 release.
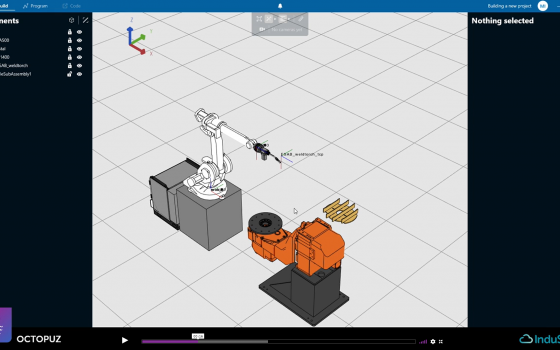
We are excited to share how easy it is to get started with your next project in OCTOPUZ. You have the ability to jump right into your next project with a personalized digital twin template of your robot cell.
ESAB Corporation announced today the launch of InduSuite, a brand-agnostic portfolio of software applications that revolutionizes workflow, quality, and business performance, to help fabricators and manufacturers improve operational efficiency.
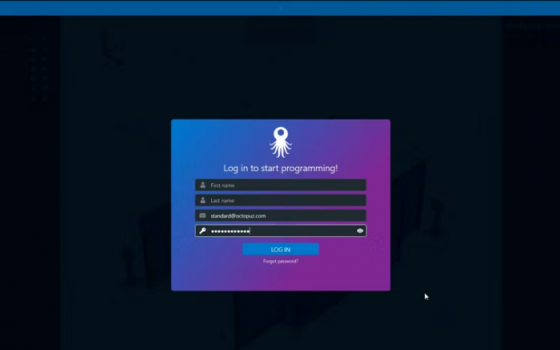
Now in OCTOPUZ, our user-based accounts allow you to easily login and program across multiple devices, so there is no interruption in your workflow – complete your initial programming on a desktop in the office or at home, and make any changes on a laptop right at the robot.
Tired of your waiting for your simulation to get what you want to see? Now in OCTOPUZ, you can simulate any statement by scrubbing to any point at any time.
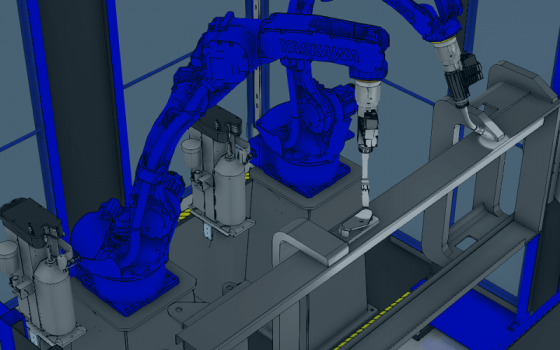
Watch our 20-minute live demo where we walk you through the new software and how OCTOPUZ can make a difference when programming your complex welds. You will walk away with the confidence to program your next welding project offline with OCTOPUZ.
Learn about the latest improvements to OCTOPUZ in our March 2022 release.
Offline Robot Programming to put you eight steps ahead.
OCTOPUZ customers Priefert Manufacturing and Penmar Automation Inc. have gone through our implementation process. Here at OCTOPUZ, we provide our customers with two implementation options, on-site and remote. Both options provide a seamless experience to get your cell set up in OCTOPUZ and programming offline.
Say hello to the Next Generation of OCTOPUZ.
As robotic welding in manufacturing extends to new and smaller-scale applications, this newfound flexibility is influencing Manufacturing 4.0.
Throughout this series, we uncovered the challenges automation solves, the benefits of automating, and how software makes automation more accessible and successful. In the last installment of this series, we asked Kel Guerin and Rob House for their advice and recommendations for companies considering robot automation software.
Programming welding robots can pose significant challenges. However, by following an effective list of do’s and don’ts, these challenges can be successfully overcome.
York Metal Products is an OCTOPUZ customer using our offline robot programming software to easily program their KUKA Weld Cell offline on a computer to realize benefits like decreased programming time and decreased robot downtime.
Robots can be complex and difficult to use without hiring a trained expert to ensure they are being used effectively, which can be very time-consuming and costly to the manufacturer. This is where software solutions can help. Read our blog to learn how software is making automation more accessible and successful.
Automated welding systems of any type are a significant investment. Investing in automation provides you with an increase in quality, consistency, and speed so you can complete your jobs faster and more efficiently. The ROI on this significant investment can be maximized by using offline programming to minimize production setup and the robot downtime that you experience.
There are benefits that are commonly linked with robotics, including; higher production rates, increased productivity, more efficient use of materials, improved safety, shorter workweeks, etc. However, we wanted to discuss the areas that we see provide exponential benefits to those looking at automating.
The Applications Engineering team at OCTOPUZ recently conducted a implementation of OCTOPUZ Offline Robot Programming Software at our long-term customer Mancor. Click here to see the program go from simulation to real life!
Our Applications Engineering team completed an onsite implementation of OCTOPUZ OLRP software for a Fanuc weld cell at Ateliers BG in Quebec, Canada. Click here to see the finished product!
The Applications Engineering team at OCTOPUZ recently conducted an onsite implementation of OCTOPUZ Offline Robot Programming Software at the ESAB Robot Lab in Gothenburg Sweden. See it for yourself!
Technological updates should simplify operations, increase productivity, and reduce costs for manufacturers. Robotic welding has allowed industries to realize these benefits by shifting welding tasks from operators to smart automated robots. With accurate programming, operators can ensure optimal robot performance and incomparable weld results.
Most people in the manufacturing space are aware of the value proposition of robots. They do not take breaks, take vacations, or call in sick. One of the many benefits of employing robots is they can run a program 24/7. Making the return on investment huge. A question often discussed in the industry is, why should we automate, and what are the challenges automation solves for manufacturers?
Offline Robot Programming software in robotics refers to programming robots off of the production line. In the case of welding robots, this means creating welding parameters on a PC off the production line in a virtual environment using CAD files. This allows the operator to create parameters in advance of the actual production run starting while the robots themselves complete production orders using a previous parameter. This minimizes downtime and allows for a quicker production turnaround.
In episode six of General Industry: OLRP Insights, we sit down with Tyler Rudnicki, Manufacturing Engineering Technologist at Yaskawa Motoman Canada, and get his take on automation in the general industry.
Implementation is the process of calibrating real system components with those in the virtual world. OCTOPUZ offers implementation services to ensure the virtual world created within OCTOPUZ exactly matches your real-world physical robot system(s).
In our latest blog, we break down absolute joint values or coordinate systems and share which is better for OLRP alignment.
A question that a first-time OLRP software user often has is "What does the process of programming robots offline look like?" In this article, we describe how an OCTOPUZ user goes from receiving a new part to program in a welding cell to running it on their robot in a matter of hours.
OCTOPUZ and Nucleo have come together to host a 30-minute insightful discussion around how manufacturers can attain the welding trifecta.
OCTOPUZ and READY have teamed up for a 30-minute insightful discussion around how manufacturers can unlock ROI utilizing robotic software.
Additive manufacturing has been increasing in popularity across the manufacturing industry in recent years. While robot additive systems are often much more expensive than their 3D printer counterparts of comparable print volume, there are a few key reasons to choose them to control your extruder.
Robotic software leaders OCTOPUZ and READY Robotics have partnered up to share their insights on the manufacturing industry. You may be thinking READY and OCTOPUZ, what an interesting partnership. Are you not competitors? How does your respective software work together? We are setting the record straight and debunking the myths around our partnership and why it’s not crazy for Offline Robot Programming (OLRP) and No Code leaders to partner.
In this article, we will take a deeper dive into touch sensing exploring how it works, when it can be useful, and what some of its limitations are.
Companies across multiple industries have been encouraged to incorporate smart manufacturing within their facilities. We agree that automation is the future. Discover the many advantages of automating with industrial robots revealed by RobotWorx.
In the virtual world: everything is perfect. In the real world: nothing is perfect. The reality is that although OLRP can produce programs that are very accurate when transferred to real robots, multiple factors can affect accuracy. In our latest blog post, we will discuss some of the most common factors that affect the accuracy of OLRP programs and some tips and tricks for dealing with them.
The robot market is diverse. However, many manufacturers tend to use a few or one robot brand in their facilities. The high cost of training staff on multiple robot brands is outweighing the desire to purchase the superior robot. We believe that robot programming should be brand agnostic, assist with programming downtime, and simple to use no matter what robot brand you have in your facilities.
Jon House sits down with Jim Groark, Sr. Project Manager at Curtiss Wright Surface Treatments. Watch this exciting conversation as they discuss how OLRP has made a difference in the way they operate.
Jon House sits down with Tom Fischer, Operations Manager at RobotWorx. RobotWorx focuses on providing quality industrial robotic solutions and customized integration worldwide. Watch Jon and Tom as they discuss how automation has made an impact in the general industry.
Jon House hosts a discussion with Aaron DeJong of Accumetal Manufacturing Inc. After many years of manual welding, the volume of work increased and triggered the need to look at more automation. Watch this exciting conversation as they discuss Accumetal’s journey with Offline Robot Programming.
What are your options for OLRP? Who offers OLRP? What red flags should you watch for? These are questions often asked by manufacturers looking to evaluate OLRP providers. Read the blog to learn how to pick the right provider for you.
Seam Tracking doesn't work reliably with aluminum workpieces. How can this be overcome with OLRP? By using Touch Sensing instead.
There will almost always be discrepancies in CAD, whether minor - a few millimeters of variance - or major - missing key components of the part. In both cases, we discuss the best solutions.
This is a question we see a lot, and so we've come up with five robot functions that are critical to the success of OLRP.
We've put together this short article on our top five key reasons to the above question
Offline Robot Programming (OLRP) is making the integration of robot systems in manufacturing more cost effective, easy to deploy, and scalable.
In a continuing series, OCTOPUZ will be examined to determine their expertise in the field of offline programming software for robotics. In this post, we will be looking at edge following applications in OCTOPUZ.
Dimic Steel Tech, a metal fabrication and machining service provider in Upland, California uses OCTOPUZ to program their robot, a KUKA KR 16 for MIG welding, from start to finish.
Flory Industries is a manufacturer of nut-harvesting equipment. They invested in a Lincoln Electric Welding Cell equipped with a Fanuc robot programmed with OCTOPUZ to weld components for their harvester machines and complete mainframes.
There is a multitude of robot brands in the industrial robotics industry, there is also a multitude of options for programming. Manual programming, OEM specific software, and third party offline programming software are some of the different approaches.
A unique quality of OCTOPUZ’s software is that it is ONE software solution to program all robot brands/models in the exact same way.
OCTOPUZ specializes in the design, development, implementation, and customization of superior Offline Programming (OLRP) software for industrial robotic applications, doing so with extensive knowledge acquired from all around the world.
Sorry, your search did not return any results.